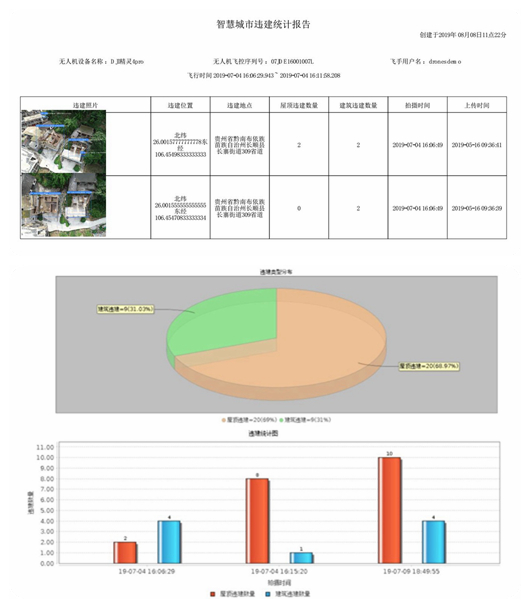
APP端采集的航拍数据上传到云服务端后,云端对含有目标(如违建建筑等)的航拍数据进行自动分析,飞完即可出具飞行区域的违建巡检报告。巡检报告可统计每次无人机飞行的航线名称、无人机飞控序列号、航线类型、飞行高度、航向重叠率、旁向重叠率、主航向角度、规划时间以及无人机的起飞降落时间、起飞地点、飞行时长等,并通过航拍对比分析,将多次飞行在相同区域中AI识别的目标进行比对。
1)、对比上一次飞行,区域中目标数量减少多少(已处理多少目标)
2)、对比上一次飞行,区域中目标数量增加多少(新增多少目标)
3)、对比上一次飞行,区域中目标数量未增加(未处理目标)
AI目标识别模型是由前期无人机采集的100-200张目标照片,进行人工标注,由AI云系统进行训练得到。如果出现识别错误的情况,可以继续增加无人机采集照片标注用于训练样本,在多次训练后,识别精度会大大提高和完善,目前可达到90%以上识别精度。
相对于传统的历史照片比对方法,实现的识别精度更高,且不受时间限制。如针对违建建筑,传统的是采用两期影像比对的方法,即将现在无人机拍摄的照片和历史照片(如一个月前拍摄的)进行图像帧差比对,找出两幅同一地点拍的照片之间的差别。这种方法存在如下缺点:1.需要历史照片,若没有,则该方法不可用,在时间上受限制。2.准确度较低,一般在50-60%。由于是找图像差别的地方,通俗比喻,若某家在屋顶晾晒了一大片衣服,而对应的历史照片里并没有,则该一大片衣服也会被识别为违建。
本系统采用AI目标识别的方法来替代传统的影像比对方法,虽然前期需要采集100-200张违建照片进行训练,但是没有需要历史照片的限制,随时可以使用,且识别准确度较高,可以达到90%甚至更高。且训练成的AI违建识别模型可以复用,不需要像传统影像比对那样,需要不停地去采集数据,比对数据,可以复用于具备相同违建特征的不同城市中,比如都有蓝色或红色彩钢瓦搭建的违建工棚等,大大节约人力成本。
另外,目前传统的影像比对方法大部分是基于单机软件平台,只能将无人机sd卡里航拍照片拷贝到电脑上使用,操作步骤繁琐,且容易数据混乱丢失。单机软件方式采用授权码方式提供给客户使用,注册使用不便于多用户管理。并且,云平台相比单机软件方式,具有可快速定制化开发,易于对接政府、企业现有信息管理平台数据等优势。
特色功能:
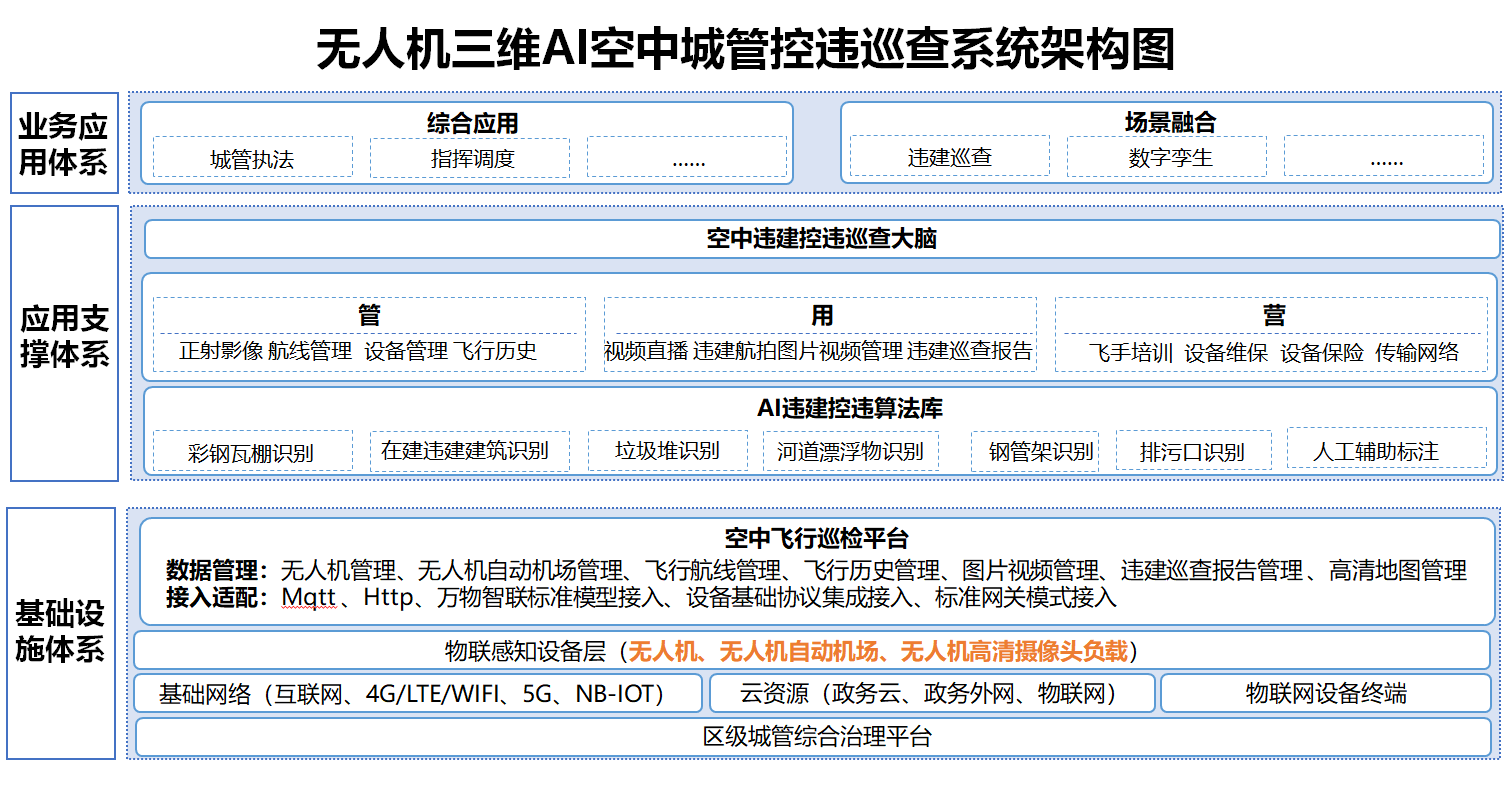
基于空中无人机AI三维巡检系统,辅助地面端AI监控系统,通过多传感器(可见光、热红外、负载IOT传感器等)融合,通过地物AI目标识别(违建屋顶、垃圾堆、河道漂浮物、排污口、车辆、行人等),热红外监测(排污口、烟火,行人等),空中污染气体监测、空中水质光谱监测等第三方IOT负载技术赋能,无人机可以从自动机场起飞,实现无人值守全自主巡检,飞完即自动生成巡检报告,返航机库。最终以三维无人机实景模型构建“3D GIS一张图”大屏可视化空地一体立体综合管理平台,可直观高效地管理城市的人、地、事务、组织等情况,直观地展示空地一体化数据,从而赋能智慧城市智能化、无人化、精细化、立体化管理,,以“空中天眼”实时保障城市运行安全,以新质生产力赋能低空经济。特色功能如下:
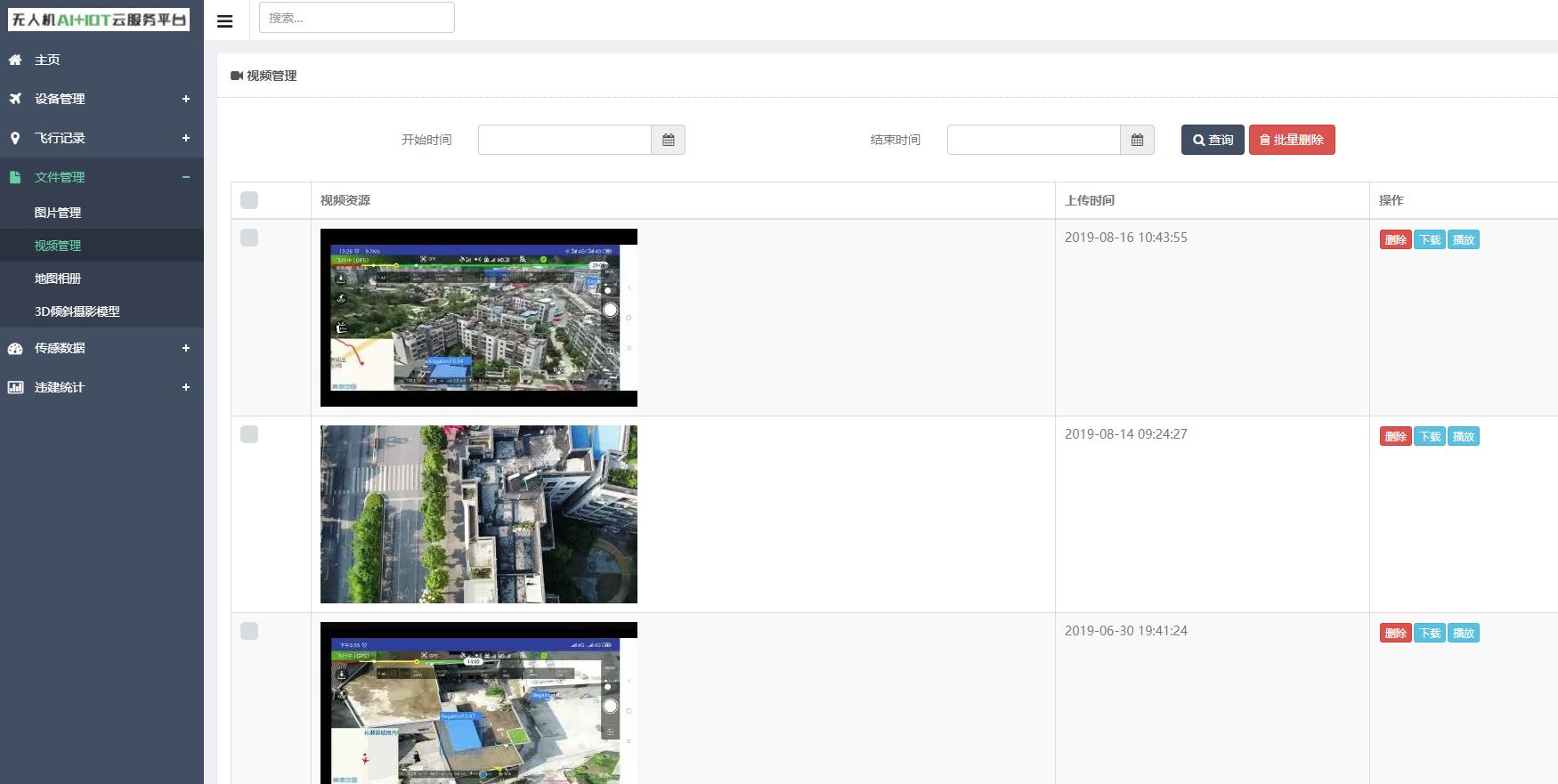
1. 云端无人机设备、地图相册、视频管理。
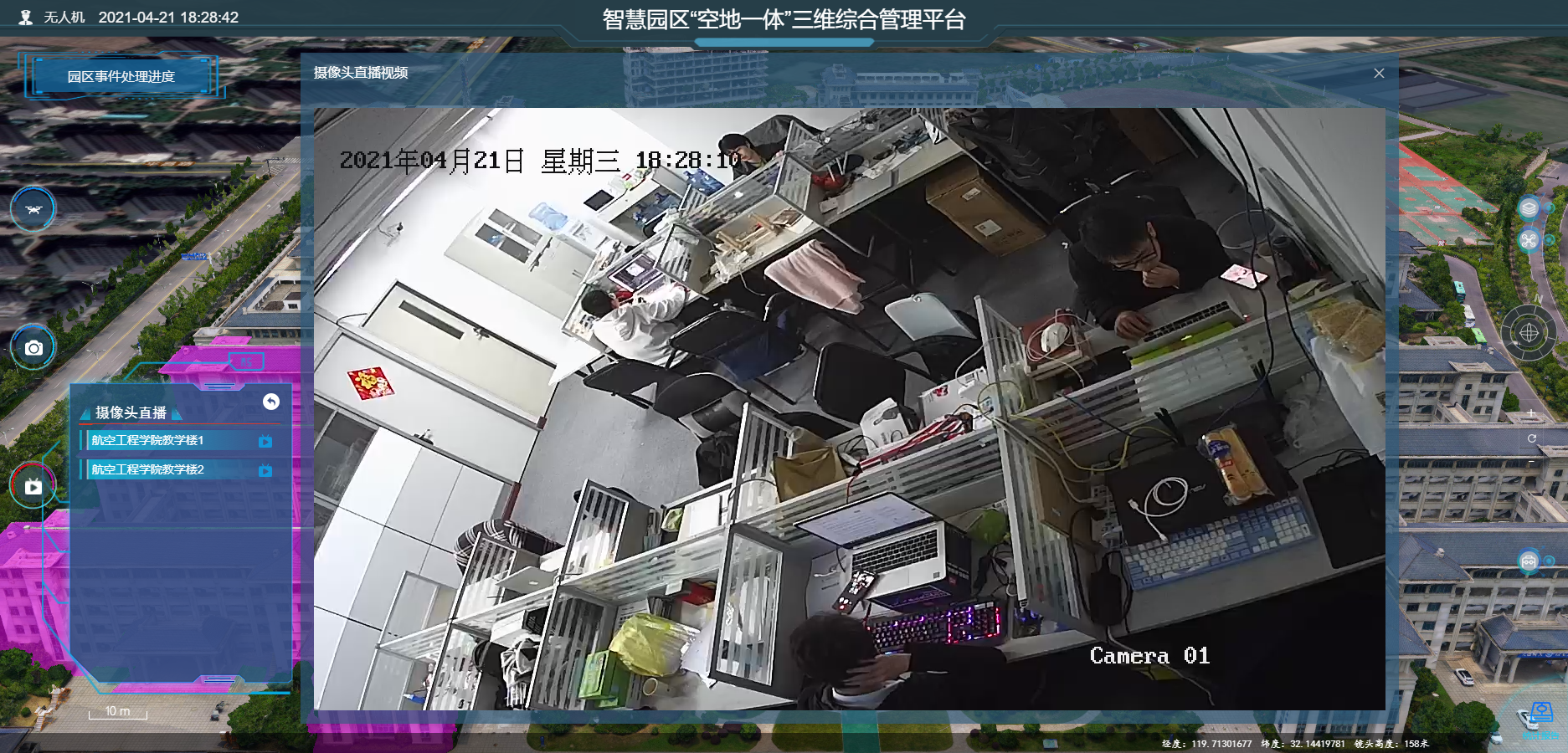
2. 云端多路视频直播。
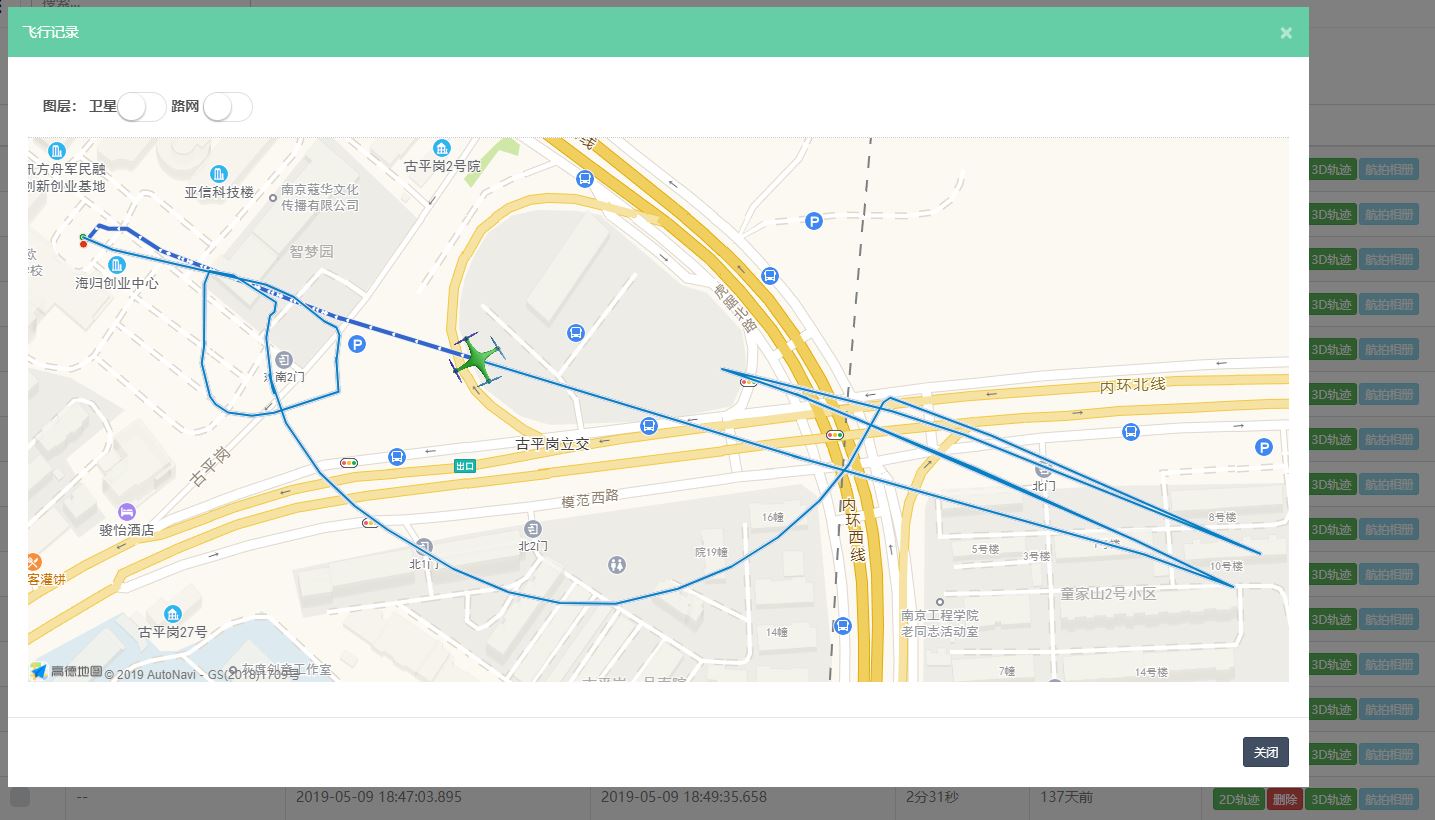
3. 云端实时三维飞行轨迹监控、高精度倾斜摄影模型建模、Web GIS定制分析。
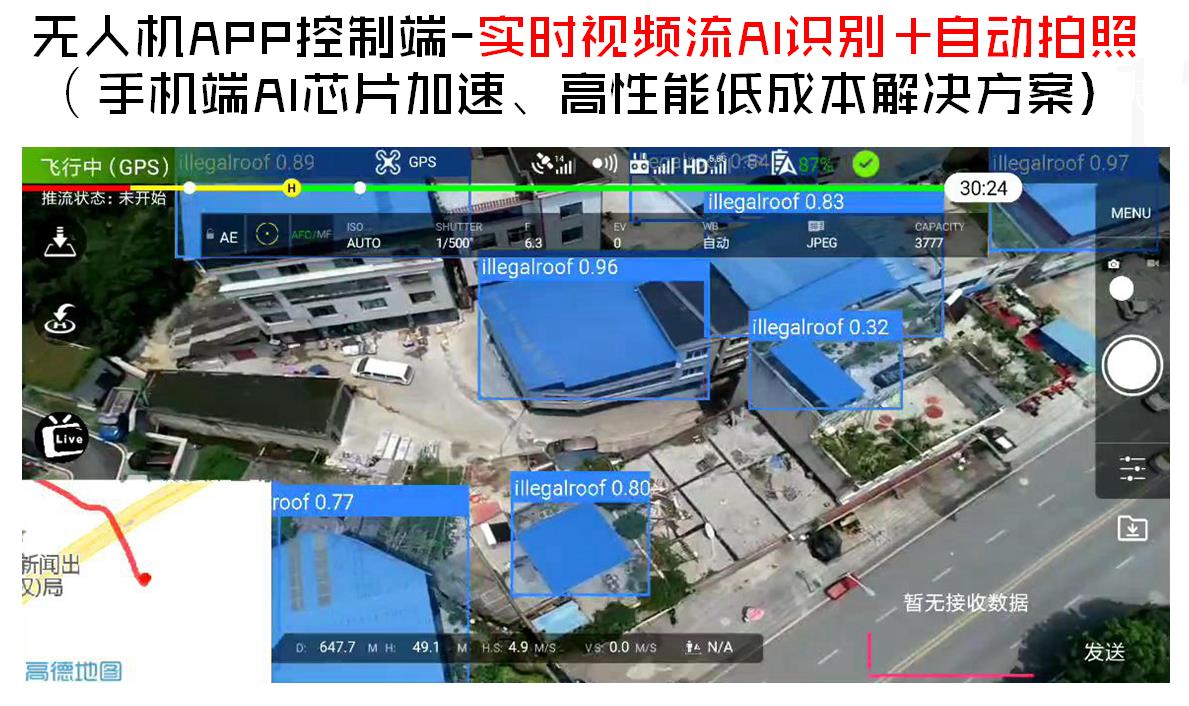
4. 无人机控制端APP实现区域内全自主飞行、实时视频流AI识别、自动化采集数据、AI芯片加速。
5. 云端二次AI识别,自动管理分析数据,自动出具巡检报告。
6. 云端跨平台多浏览器支持、电脑端、大屏幕端、手机端无缝兼容。
7. 云端IOT接入、匹配无人机PSDK/OSDK负载硬件。
8. 端云一体、兼容大疆全系列机型。
9. 多数据源接口:可见光、热红外、多光谱、雷达、自动机场。
10. 三维GIS“一图式”大屏可视化系统,可将整个云平台的云端设备管理模块、云端图片AI识别分析模块、云端视频直播模块、云端2D飞行轨迹模块、云端3D飞行轨迹模块、云端视频管理模块、云端信息管理模块的数据在大屏幕上一体化显示,并提供开放数据接口无缝对接其他WEB管理平台,如智慧城管地面信息系统。
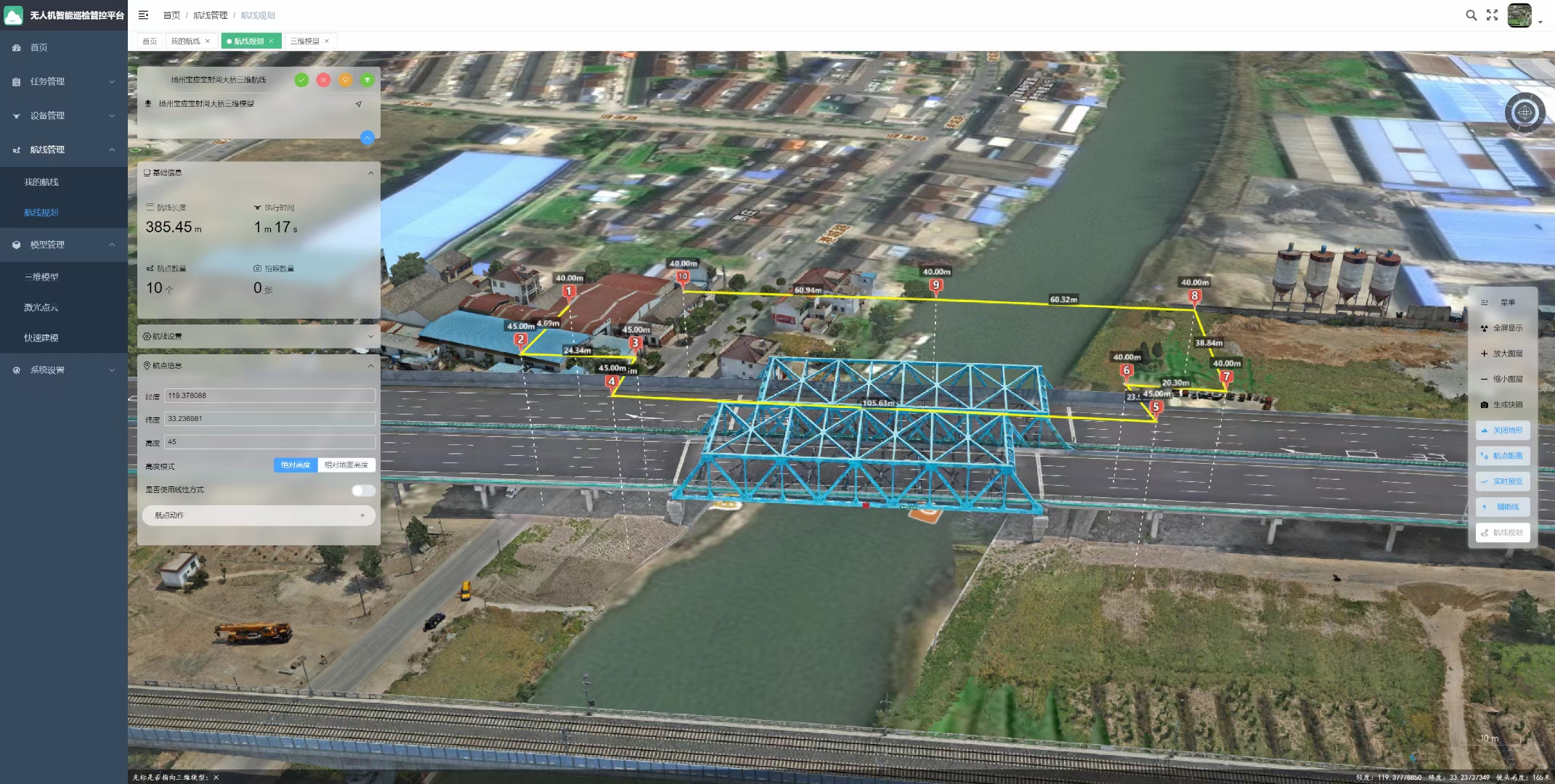
11. 平台支持基于三维激光点云或实景三维模型对桥梁、电塔、通信塔、建筑、矿山、港口工地塔吊、厂房等立面目标进行三维航线规划,生成三维航线和航拍点,由无人机从自动机场远程自主起飞执行巡检作业。平台可对多条三维航线进行管理及查询,包括航线名称,创建时间,修改时间,飞行速度等,还可对三维航线进行可视化模拟飞行预览。
12. 平台已实现从三维实景或点云模型外部导入或快速建模>工单任务>三维航线规划>无人机接受任务工单自主巡检拍照上传自动>映射三维地图拍照点>照片AI识别及人工辅助>自动化出具巡检报告的整个巡检数据流的闭环运转。
13. 平台可提供管理者“无人机低空巡查助手”微信小程序,配套无人机AI三维巡检云平台,对无人机低空飞行巡检识别到的各类信息进行地图相册式数据统计和报告展示,方便管理者实时掌握整个动态巡查数据,统筹顶层决策。
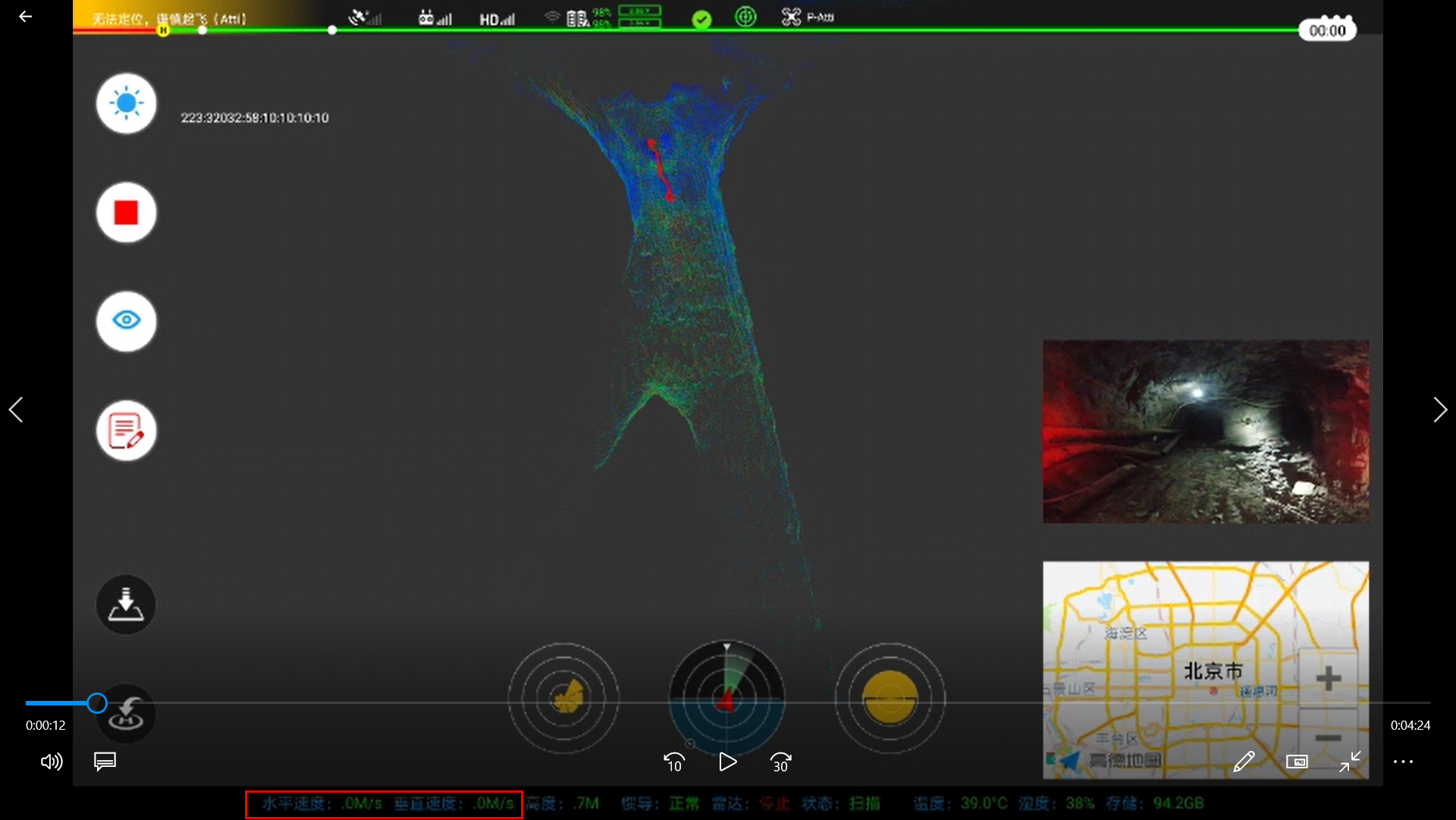
14. 平台支持多类型应用场景,包括针对广域目标监测的室外应用场景(如城管、社区、园区、河湖、农田等),针对立面精细目标检测的室内外应用场景(风机、电塔、通信塔、工业塔、客机、地下矿等)等。